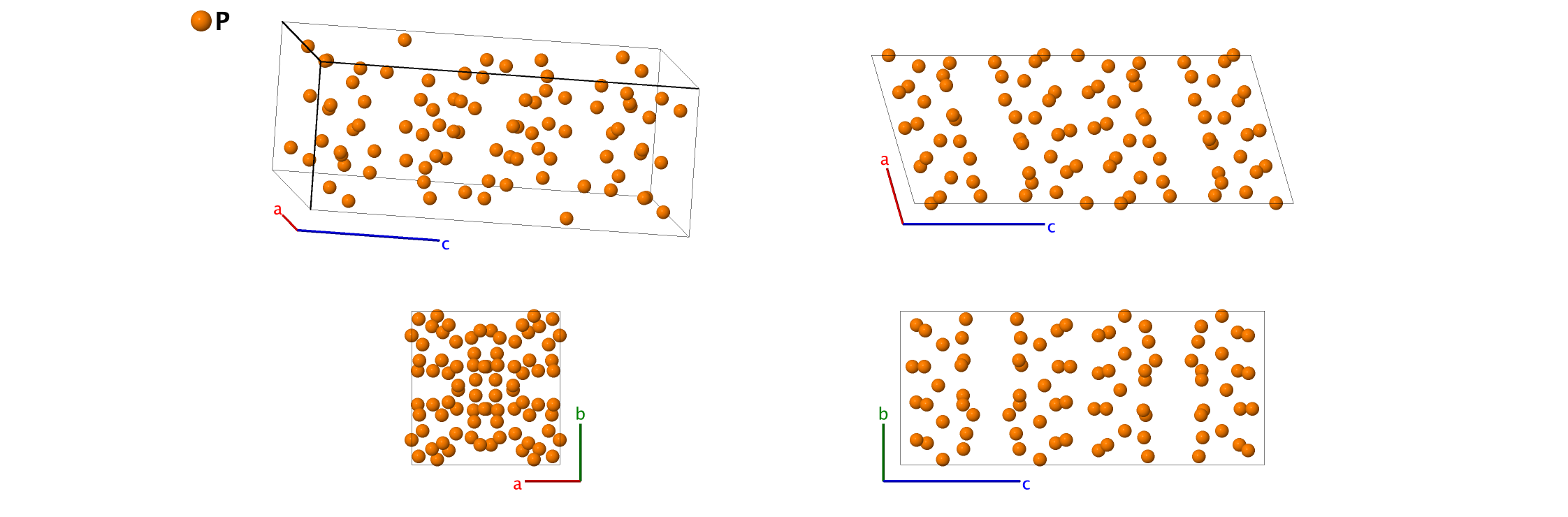
Monoclinic (Hittorf's) Phosphorus Structure: A_mP84_13_21g
| Prototype | : | P |
| AFLOW prototype label | : | A_mP84_13_21g |
| Strukturbericht designation | : | None |
| Pearson symbol | : | mP84 |
| Space group number | : | 13 |
| Space group symbol | : | $\mbox{P2/c}$ |
| AFLOW prototype command | : | aflow --proto=A_mP84_13_21g --params=$a,b/a,c/a,\beta,x_{1},y_{1},z_{1},x_{2},y_{2},z_{2},x_{3},y_{3},z_{3},x_{4},y_{4},z_{4},x_{5},y_{5},z_{5},x_{6},y_{6},z_{6}, \\x_{7},y_{7},z_{7},x_{8},y_{8},z_{8},x_{9},y_{9},z_{9},x_{10},y_{10},z_{10},x_{11},y_{11},z_{11},x_{12},y_{12},z_{12},x_{13},y_{13},z_{13},x_{14}, \\y_{14},z_{14},x_{15},y_{15},z_{15},x_{16},y_{16},z_{16},x_{17},y_{17},z_{17},x_{18},y_{18},z_{18},x_{19},y_{19},z_{19},x_{20},y_{20},z_{20}, \\x_{21},y_{21},z_{21}$ |
Simple Monoclinic primitive vectors:
\[
\begin{array}{ccc}
\mathbf{a}_1 & = & a \, \mathbf{\hat{x}} \\
\mathbf{a}_2 & = & b \, \mathbf{\hat{y}} \\
\mathbf{a}_3 & = & c \cos\beta \, \mathbf{\hat{x}} + c \sin\beta \, \mathbf{\hat{z}}
\end{array}
\]
Basis vectors:
\[ \begin{array}{ccccccc} & & \mbox{Lattice Coordinates} & & \mbox{Cartesian Coordinates} &\mbox{Wyckoff Position} & \mbox{Atom Type} \\ \mathbf{B}_{1} & = &x_{1} \, \mathbf{a}_{1} + y_{1} \, \mathbf{a}_{2} + z_{1} \, \mathbf{a_{3}}& = &\left(x_{1} \, a + z_{1} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{1} \, b \, \mathbf{\hat{y}}+ z_{1} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P I} \\ \mathbf{B}_{2} & = &-x_{1} \, \mathbf{a}_{1} + y_{1} \, \mathbf{a}_{2} + \left(\frac12 - z_{1}\right) \, \mathbf{a_{3}}& = &\left(-x_{1} \, a + \left(\frac12 - z_{1}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{1} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{1}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P I} \\ \mathbf{B}_{3} & = &- x_{1} \, \mathbf{a}_{1} - y_{1} \, \mathbf{a}_{2} - z_{1} \, \mathbf{a_{3}}& = &- \left(x_{1} \, a + z_{1} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{1} \, b \, \mathbf{\hat{y}}- z_{1} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P I} \\ \mathbf{B}_{4} & = &x_{1} \, \mathbf{a}_{1} - y_{1} \, \mathbf{a}_{2} + \left(\frac12 + z_{1}\right) \, \mathbf{a_{3}}& = &\left(x_{1} \, a + \left(\frac12 + z_{1}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{1} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{1}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P I} \\ \mathbf{B}_{5} & = &x_{2} \, \mathbf{a}_{1} + y_{2} \, \mathbf{a}_{2} + z_{2} \, \mathbf{a_{3}}& = &\left(x_{2} \, a + z_{2} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{2} \, b \, \mathbf{\hat{y}}+ z_{2} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P II} \\ \mathbf{B}_{6} & = &-x_{2} \, \mathbf{a}_{1} + y_{2} \, \mathbf{a}_{2} + \left(\frac12 - z_{2}\right) \, \mathbf{a_{3}}& = &\left(-x_{2} \, a + \left(\frac12 - z_{2}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{2} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{2}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P II} \\ \mathbf{B}_{7} & = &- x_{2} \, \mathbf{a}_{1} - y_{2} \, \mathbf{a}_{2} - z_{2} \, \mathbf{a_{3}}& = &- \left(x_{2} \, a + z_{2} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{2} \, b \, \mathbf{\hat{y}}- z_{2} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P II} \\ \mathbf{B}_{8} & = &x_{2} \, \mathbf{a}_{1} - y_{2} \, \mathbf{a}_{2} + \left(\frac12 + z_{2}\right) \, \mathbf{a_{3}}& = &\left(x_{2} \, a + \left(\frac12 + z_{2}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{2} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{2}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P II} \\ \mathbf{B}_{9} & = &x_{3} \, \mathbf{a}_{1} + y_{3} \, \mathbf{a}_{2} + z_{3} \, \mathbf{a_{3}}& = &\left(x_{3} \, a + z_{3} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{3} \, b \, \mathbf{\hat{y}}+ z_{3} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P III} \\ \mathbf{B}_{10} & = &-x_{3} \, \mathbf{a}_{1} + y_{3} \, \mathbf{a}_{2} + \left(\frac12 - z_{3}\right) \, \mathbf{a_{3}}& = &\left(-x_{3} \, a + \left(\frac12 - z_{3}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{3} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{3}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P III} \\ \mathbf{B}_{11} & = &- x_{3} \, \mathbf{a}_{1} - y_{3} \, \mathbf{a}_{2} - z_{3} \, \mathbf{a_{3}}& = &- \left(x_{3} \, a + z_{3} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{3} \, b \, \mathbf{\hat{y}}- z_{3} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P III} \\ \mathbf{B}_{12} & = &x_{3} \, \mathbf{a}_{1} - y_{3} \, \mathbf{a}_{2} + \left(\frac12 + z_{3}\right) \, \mathbf{a_{3}}& = &\left(x_{3} \, a + \left(\frac12 + z_{3}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{3} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{3}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P III} \\ \mathbf{B}_{13} & = &x_{4} \, \mathbf{a}_{1} + y_{4} \, \mathbf{a}_{2} + z_{4} \, \mathbf{a_{3}}& = &\left(x_{4} \, a + z_{4} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{4} \, b \, \mathbf{\hat{y}}+ z_{4} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P IV} \\ \mathbf{B}_{14} & = &-x_{4} \, \mathbf{a}_{1} + y_{4} \, \mathbf{a}_{2} + \left(\frac12 - z_{4}\right) \, \mathbf{a_{3}}& = &\left(-x_{4} \, a + \left(\frac12 - z_{4}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{4} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{4}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P IV} \\ \mathbf{B}_{15} & = &- x_{4} \, \mathbf{a}_{1} - y_{4} \, \mathbf{a}_{2} - z_{4} \, \mathbf{a_{3}}& = &- \left(x_{4} \, a + z_{4} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{4} \, b \, \mathbf{\hat{y}}- z_{4} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P IV} \\ \mathbf{B}_{16} & = &x_{4} \, \mathbf{a}_{1} - y_{4} \, \mathbf{a}_{2} + \left(\frac12 + z_{4}\right) \, \mathbf{a_{3}}& = &\left(x_{4} \, a + \left(\frac12 + z_{4}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{4} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{4}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P IV} \\ \mathbf{B}_{17} & = &x_{5} \, \mathbf{a}_{1} + y_{5} \, \mathbf{a}_{2} + z_{5} \, \mathbf{a_{3}}& = &\left(x_{5} \, a + z_{5} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{5} \, b \, \mathbf{\hat{y}}+ z_{5} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P V} \\ \mathbf{B}_{18} & = &-x_{5} \, \mathbf{a}_{1} + y_{5} \, \mathbf{a}_{2} + \left(\frac12 - z_{5}\right) \, \mathbf{a_{3}}& = &\left(-x_{5} \, a + \left(\frac12 - z_{5}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{5} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{5}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P V} \\ \mathbf{B}_{19} & = &- x_{5} \, \mathbf{a}_{1} - y_{5} \, \mathbf{a}_{2} - z_{5} \, \mathbf{a_{3}}& = &- \left(x_{5} \, a + z_{5} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{5} \, b \, \mathbf{\hat{y}}- z_{5} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P V} \\ \mathbf{B}_{20} & = &x_{5} \, \mathbf{a}_{1} - y_{5} \, \mathbf{a}_{2} + \left(\frac12 + z_{5}\right) \, \mathbf{a_{3}}& = &\left(x_{5} \, a + \left(\frac12 + z_{5}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{5} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{5}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P V} \\ \mathbf{B}_{21} & = &x_{6} \, \mathbf{a}_{1} + y_{6} \, \mathbf{a}_{2} + z_{6} \, \mathbf{a_{3}}& = &\left(x_{6} \, a + z_{6} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{6} \, b \, \mathbf{\hat{y}}+ z_{6} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P VI} \\ \mathbf{B}_{22} & = &-x_{6} \, \mathbf{a}_{1} + y_{6} \, \mathbf{a}_{2} + \left(\frac12 - z_{6}\right) \, \mathbf{a_{3}}& = &\left(-x_{6} \, a + \left(\frac12 - z_{6}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{6} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{6}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P VI} \\ \mathbf{B}_{23} & = &- x_{6} \, \mathbf{a}_{1} - y_{6} \, \mathbf{a}_{2} - z_{6} \, \mathbf{a_{3}}& = &- \left(x_{6} \, a + z_{6} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{6} \, b \, \mathbf{\hat{y}}- z_{6} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P VI} \\ \mathbf{B}_{24} & = &x_{6} \, \mathbf{a}_{1} - y_{6} \, \mathbf{a}_{2} + \left(\frac12 + z_{6}\right) \, \mathbf{a_{3}}& = &\left(x_{6} \, a + \left(\frac12 + z_{6}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{6} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{6}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P VI} \\ \mathbf{B}_{25} & = &x_{7} \, \mathbf{a}_{1} + y_{7} \, \mathbf{a}_{2} + z_{7} \, \mathbf{a_{3}}& = &\left(x_{7} \, a + z_{7} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{7} \, b \, \mathbf{\hat{y}}+ z_{7} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P VII} \\ \mathbf{B}_{26} & = &-x_{7} \, \mathbf{a}_{1} + y_{7} \, \mathbf{a}_{2} + \left(\frac12 - z_{7}\right) \, \mathbf{a_{3}}& = &\left(-x_{7} \, a + \left(\frac12 - z_{7}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{7} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{7}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P VII} \\ \mathbf{B}_{27} & = &- x_{7} \, \mathbf{a}_{1} - y_{7} \, \mathbf{a}_{2} - z_{7} \, \mathbf{a_{3}}& = &- \left(x_{7} \, a + z_{7} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{7} \, b \, \mathbf{\hat{y}}- z_{7} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P VII} \\ \mathbf{B}_{28} & = &x_{7} \, \mathbf{a}_{1} - y_{7} \, \mathbf{a}_{2} + \left(\frac12 + z_{7}\right) \, \mathbf{a_{3}}& = &\left(x_{7} \, a + \left(\frac12 + z_{7}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{7} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{7}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P VII} \\ \mathbf{B}_{29} & = &x_{8} \, \mathbf{a}_{1} + y_{8} \, \mathbf{a}_{2} + z_{8} \, \mathbf{a_{3}}& = &\left(x_{8} \, a + z_{8} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{8} \, b \, \mathbf{\hat{y}}+ z_{8} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P VIII} \\ \mathbf{B}_{30} & = &-x_{8} \, \mathbf{a}_{1} + y_{8} \, \mathbf{a}_{2} + \left(\frac12 - z_{8}\right) \, \mathbf{a_{3}}& = &\left(-x_{8} \, a + \left(\frac12 - z_{8}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{8} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{8}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P VIII} \\ \mathbf{B}_{31} & = &- x_{8} \, \mathbf{a}_{1} - y_{8} \, \mathbf{a}_{2} - z_{8} \, \mathbf{a_{3}}& = &- \left(x_{8} \, a + z_{8} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{8} \, b \, \mathbf{\hat{y}}- z_{8} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P VIII} \\ \mathbf{B}_{32} & = &x_{8} \, \mathbf{a}_{1} - y_{8} \, \mathbf{a}_{2} + \left(\frac12 + z_{8}\right) \, \mathbf{a_{3}}& = &\left(x_{8} \, a + \left(\frac12 + z_{8}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{8} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{8}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P VIII} \\ \mathbf{B}_{33} & = &x_{9} \, \mathbf{a}_{1} + y_{9} \, \mathbf{a}_{2} + z_{9} \, \mathbf{a_{3}}& = &\left(x_{9} \, a + z_{9} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{9} \, b \, \mathbf{\hat{y}}+ z_{9} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P IX} \\ \mathbf{B}_{34} & = &-x_{9} \, \mathbf{a}_{1} + y_{9} \, \mathbf{a}_{2} + \left(\frac12 - z_{9}\right) \, \mathbf{a_{3}}& = &\left(-x_{9} \, a + \left(\frac12 - z_{9}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{9} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{9}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P IX} \\ \mathbf{B}_{35} & = &- x_{9} \, \mathbf{a}_{1} - y_{9} \, \mathbf{a}_{2} - z_{9} \, \mathbf{a_{3}}& = &- \left(x_{9} \, a + z_{9} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{9} \, b \, \mathbf{\hat{y}}- z_{9} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P IX} \\ \mathbf{B}_{36} & = &x_{9} \, \mathbf{a}_{1} - y_{9} \, \mathbf{a}_{2} + \left(\frac12 + z_{9}\right) \, \mathbf{a_{3}}& = &\left(x_{9} \, a + \left(\frac12 + z_{9}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{9} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{9}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P IX} \\ \mathbf{B}_{37} & = &x_{10} \, \mathbf{a}_{1} + y_{10} \, \mathbf{a}_{2} + z_{10} \, \mathbf{a_{3}}& = &\left(x_{10} \, a + z_{10} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{10} \, b \, \mathbf{\hat{y}}+ z_{10} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P X} \\ \mathbf{B}_{38} & = &-x_{10} \, \mathbf{a}_{1} + y_{10} \, \mathbf{a}_{2} + \left(\frac12 - z_{10}\right) \, \mathbf{a_{3}}& = &\left(-x_{10} \, a + \left(\frac12 - z_{10}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{10} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{10}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P X} \\ \mathbf{B}_{39} & = &- x_{10} \, \mathbf{a}_{1} - y_{10} \, \mathbf{a}_{2} - z_{10} \, \mathbf{a_{3}}& = &- \left(x_{10} \, a + z_{10} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{10} \, b \, \mathbf{\hat{y}}- z_{10} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P X} \\ \mathbf{B}_{40} & = &x_{10} \, \mathbf{a}_{1} - y_{10} \, \mathbf{a}_{2} + \left(\frac12 + z_{10}\right) \, \mathbf{a_{3}}& = &\left(x_{10} \, a + \left(\frac12 + z_{10}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{10} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{10}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P X} \\ \mathbf{B}_{41} & = &x_{11} \, \mathbf{a}_{1} + y_{11} \, \mathbf{a}_{2} + z_{11} \, \mathbf{a_{3}}& = &\left(x_{11} \, a + z_{11} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{11} \, b \, \mathbf{\hat{y}}+ z_{11} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XI} \\ \mathbf{B}_{42} & = &-x_{11} \, \mathbf{a}_{1} + y_{11} \, \mathbf{a}_{2} + \left(\frac12 - z_{11}\right) \, \mathbf{a_{3}}& = &\left(-x_{11} \, a + \left(\frac12 - z_{11}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{11} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{11}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XI} \\ \mathbf{B}_{43} & = &- x_{11} \, \mathbf{a}_{1} - y_{11} \, \mathbf{a}_{2} - z_{11} \, \mathbf{a_{3}}& = &- \left(x_{11} \, a + z_{11} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{11} \, b \, \mathbf{\hat{y}}- z_{11} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XI} \\ \mathbf{B}_{44} & = &x_{11} \, \mathbf{a}_{1} - y_{11} \, \mathbf{a}_{2} + \left(\frac12 + z_{11}\right) \, \mathbf{a_{3}}& = &\left(x_{11} \, a + \left(\frac12 + z_{11}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{11} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{11}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XI} \\ \mathbf{B}_{45} & = &x_{12} \, \mathbf{a}_{1} + y_{12} \, \mathbf{a}_{2} + z_{12} \, \mathbf{a_{3}}& = &\left(x_{12} \, a + z_{12} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{12} \, b \, \mathbf{\hat{y}}+ z_{12} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XII} \\ \mathbf{B}_{46} & = &-x_{12} \, \mathbf{a}_{1} + y_{12} \, \mathbf{a}_{2} + \left(\frac12 - z_{12}\right) \, \mathbf{a_{3}}& = &\left(-x_{12} \, a + \left(\frac12 - z_{12}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{12} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{12}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XII} \\ \mathbf{B}_{47} & = &- x_{12} \, \mathbf{a}_{1} - y_{12} \, \mathbf{a}_{2} - z_{12} \, \mathbf{a_{3}}& = &- \left(x_{12} \, a + z_{12} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{12} \, b \, \mathbf{\hat{y}}- z_{12} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XII} \\ \mathbf{B}_{48} & = &x_{12} \, \mathbf{a}_{1} - y_{12} \, \mathbf{a}_{2} + \left(\frac12 + z_{12}\right) \, \mathbf{a_{3}}& = &\left(x_{12} \, a + \left(\frac12 + z_{12}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{12} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{12}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XII} \\ \mathbf{B}_{49} & = &x_{13} \, \mathbf{a}_{1} + y_{13} \, \mathbf{a}_{2} + z_{13} \, \mathbf{a_{3}}& = &\left(x_{13} \, a + z_{13} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{13} \, b \, \mathbf{\hat{y}}+ z_{13} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XIII} \\ \mathbf{B}_{50} & = &-x_{13} \, \mathbf{a}_{1} + y_{13} \, \mathbf{a}_{2} + \left(\frac12 - z_{13}\right) \, \mathbf{a_{3}}& = &\left(-x_{13} \, a + \left(\frac12 - z_{13}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{13} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{13}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XIII} \\ \mathbf{B}_{51} & = &- x_{13} \, \mathbf{a}_{1} - y_{13} \, \mathbf{a}_{2} - z_{13} \, \mathbf{a_{3}}& = &- \left(x_{13} \, a + z_{13} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{13} \, b \, \mathbf{\hat{y}}- z_{13} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XIII} \\ \mathbf{B}_{52} & = &x_{13} \, \mathbf{a}_{1} - y_{13} \, \mathbf{a}_{2} + \left(\frac12 + z_{13}\right) \, \mathbf{a_{3}}& = &\left(x_{13} \, a + \left(\frac12 + z_{13}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{13} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{13}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XIII} \\ \mathbf{B}_{53} & = &x_{14} \, \mathbf{a}_{1} + y_{14} \, \mathbf{a}_{2} + z_{14} \, \mathbf{a_{3}}& = &\left(x_{14} \, a + z_{14} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{14} \, b \, \mathbf{\hat{y}}+ z_{14} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XIV} \\ \mathbf{B}_{54} & = &-x_{14} \, \mathbf{a}_{1} + y_{14} \, \mathbf{a}_{2} + \left(\frac12 - z_{14}\right) \, \mathbf{a_{3}}& = &\left(-x_{14} \, a + \left(\frac12 - z_{14}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{14} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{14}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XIV} \\ \mathbf{B}_{55} & = &- x_{14} \, \mathbf{a}_{1} - y_{14} \, \mathbf{a}_{2} - z_{14} \, \mathbf{a_{3}}& = &- \left(x_{14} \, a + z_{14} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{14} \, b \, \mathbf{\hat{y}}- z_{14} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XIV} \\ \mathbf{B}_{56} & = &x_{14} \, \mathbf{a}_{1} - y_{14} \, \mathbf{a}_{2} + \left(\frac12 + z_{14}\right) \, \mathbf{a_{3}}& = &\left(x_{14} \, a + \left(\frac12 + z_{14}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{14} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{14}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XIV} \\ \mathbf{B}_{57} & = &x_{15} \, \mathbf{a}_{1} + y_{15} \, \mathbf{a}_{2} + z_{15} \, \mathbf{a_{3}}& = &\left(x_{15} \, a + z_{15} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{15} \, b \, \mathbf{\hat{y}}+ z_{15} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XV} \\ \mathbf{B}_{58} & = &-x_{15} \, \mathbf{a}_{1} + y_{15} \, \mathbf{a}_{2} + \left(\frac12 - z_{15}\right) \, \mathbf{a_{3}}& = &\left(-x_{15} \, a + \left(\frac12 - z_{15}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{15} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{15}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XV} \\ \mathbf{B}_{59} & = &- x_{15} \, \mathbf{a}_{1} - y_{15} \, \mathbf{a}_{2} - z_{15} \, \mathbf{a_{3}}& = &- \left(x_{15} \, a + z_{15} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{15} \, b \, \mathbf{\hat{y}}- z_{15} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XV} \\ \mathbf{B}_{60} & = &x_{15} \, \mathbf{a}_{1} - y_{15} \, \mathbf{a}_{2} + \left(\frac12 + z_{15}\right) \, \mathbf{a_{3}}& = &\left(x_{15} \, a + \left(\frac12 + z_{15}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{15} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{15}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XV} \\ \mathbf{B}_{61} & = &x_{16} \, \mathbf{a}_{1} + y_{16} \, \mathbf{a}_{2} + z_{16} \, \mathbf{a_{3}}& = &\left(x_{16} \, a + z_{16} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{16} \, b \, \mathbf{\hat{y}}+ z_{16} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XVI} \\ \mathbf{B}_{62} & = &-x_{16} \, \mathbf{a}_{1} + y_{16} \, \mathbf{a}_{2} + \left(\frac12 - z_{16}\right) \, \mathbf{a_{3}}& = &\left(-x_{16} \, a + \left(\frac12 - z_{16}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{16} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{16}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XVI} \\ \mathbf{B}_{63} & = &- x_{16} \, \mathbf{a}_{1} - y_{16} \, \mathbf{a}_{2} - z_{16} \, \mathbf{a_{3}}& = &- \left(x_{16} \, a + z_{16} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{16} \, b \, \mathbf{\hat{y}}- z_{16} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XVI} \\ \mathbf{B}_{64} & = &x_{16} \, \mathbf{a}_{1} - y_{16} \, \mathbf{a}_{2} + \left(\frac12 + z_{16}\right) \, \mathbf{a_{3}}& = &\left(x_{16} \, a + \left(\frac12 + z_{16}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{16} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{16}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XVI} \\ \mathbf{B}_{65} & = &x_{17} \, \mathbf{a}_{1} + y_{17} \, \mathbf{a}_{2} + z_{17} \, \mathbf{a_{3}}& = &\left(x_{17} \, a + z_{17} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{17} \, b \, \mathbf{\hat{y}}+ z_{17} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XVII} \\ \mathbf{B}_{66} & = &-x_{17} \, \mathbf{a}_{1} + y_{17} \, \mathbf{a}_{2} + \left(\frac12 - z_{17}\right) \, \mathbf{a_{3}}& = &\left(-x_{17} \, a + \left(\frac12 - z_{17}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{17} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{17}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XVII} \\ \mathbf{B}_{67} & = &- x_{17} \, \mathbf{a}_{1} - y_{17} \, \mathbf{a}_{2} - z_{17} \, \mathbf{a_{3}}& = &- \left(x_{17} \, a + z_{17} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{17} \, b \, \mathbf{\hat{y}}- z_{17} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XVII} \\ \mathbf{B}_{68} & = &x_{17} \, \mathbf{a}_{1} - y_{17} \, \mathbf{a}_{2} + \left(\frac12 + z_{17}\right) \, \mathbf{a_{3}}& = &\left(x_{17} \, a + \left(\frac12 + z_{17}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{17} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{17}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XVII} \\ \mathbf{B}_{69} & = &x_{18} \, \mathbf{a}_{1} + y_{18} \, \mathbf{a}_{2} + z_{18} \, \mathbf{a_{3}}& = &\left(x_{18} \, a + z_{18} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{18} \, b \, \mathbf{\hat{y}}+ z_{18} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XVIII} \\ \mathbf{B}_{70} & = &-x_{18} \, \mathbf{a}_{1} + y_{18} \, \mathbf{a}_{2} + \left(\frac12 - z_{18}\right) \, \mathbf{a_{3}}& = &\left(-x_{18} \, a + \left(\frac12 - z_{18}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{18} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{18}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XVIII} \\ \mathbf{B}_{71} & = &- x_{18} \, \mathbf{a}_{1} - y_{18} \, \mathbf{a}_{2} - z_{18} \, \mathbf{a_{3}}& = &- \left(x_{18} \, a + z_{18} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{18} \, b \, \mathbf{\hat{y}}- z_{18} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XVIII} \\ \mathbf{B}_{72} & = &x_{18} \, \mathbf{a}_{1} - y_{18} \, \mathbf{a}_{2} + \left(\frac12 + z_{18}\right) \, \mathbf{a_{3}}& = &\left(x_{18} \, a + \left(\frac12 + z_{18}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{18} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{18}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XVIII} \\ \mathbf{B}_{73} & = &x_{19} \, \mathbf{a}_{1} + y_{19} \, \mathbf{a}_{2} + z_{19} \, \mathbf{a_{3}}& = &\left(x_{19} \, a + z_{19} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{19} \, b \, \mathbf{\hat{y}}+ z_{19} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XIX} \\ \mathbf{B}_{74} & = &-x_{19} \, \mathbf{a}_{1} + y_{19} \, \mathbf{a}_{2} + \left(\frac12 - z_{19}\right) \, \mathbf{a_{3}}& = &\left(-x_{19} \, a + \left(\frac12 - z_{19}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{19} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{19}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XIX} \\ \mathbf{B}_{75} & = &- x_{19} \, \mathbf{a}_{1} - y_{19} \, \mathbf{a}_{2} - z_{19} \, \mathbf{a_{3}}& = &- \left(x_{19} \, a + z_{19} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{19} \, b \, \mathbf{\hat{y}}- z_{19} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XIX} \\ \mathbf{B}_{76} & = &x_{19} \, \mathbf{a}_{1} - y_{19} \, \mathbf{a}_{2} + \left(\frac12 + z_{19}\right) \, \mathbf{a_{3}}& = &\left(x_{19} \, a + \left(\frac12 + z_{19}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{19} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{19}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XIX} \\ \mathbf{B}_{77} & = &x_{20} \, \mathbf{a}_{1} + y_{20} \, \mathbf{a}_{2} + z_{20} \, \mathbf{a_{3}}& = &\left(x_{20} \, a + z_{20} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{20} \, b \, \mathbf{\hat{y}}+ z_{20} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XX} \\ \mathbf{B}_{78} & = &-x_{20} \, \mathbf{a}_{1} + y_{20} \, \mathbf{a}_{2} + \left(\frac12 - z_{20}\right) \, \mathbf{a_{3}}& = &\left(-x_{20} \, a + \left(\frac12 - z_{20}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{20} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{20}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XX} \\ \mathbf{B}_{79} & = &- x_{20} \, \mathbf{a}_{1} - y_{20} \, \mathbf{a}_{2} - z_{20} \, \mathbf{a_{3}}& = &- \left(x_{20} \, a + z_{20} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{20} \, b \, \mathbf{\hat{y}}- z_{20} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XX} \\ \mathbf{B}_{80} & = &x_{20} \, \mathbf{a}_{1} - y_{20} \, \mathbf{a}_{2} + \left(\frac12 + z_{20}\right) \, \mathbf{a_{3}}& = &\left(x_{20} \, a + \left(\frac12 + z_{20}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{20} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{20}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XX} \\ \mathbf{B}_{81} & = &x_{21} \, \mathbf{a}_{1} + y_{21} \, \mathbf{a}_{2} + z_{21} \, \mathbf{a_{3}}& = &\left(x_{21} \, a + z_{21} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{21} \, b \, \mathbf{\hat{y}}+ z_{21} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XXI} \\ \mathbf{B}_{82} & = &-x_{21} \, \mathbf{a}_{1} + y_{21} \, \mathbf{a}_{2} + \left(\frac12 - z_{21}\right) \, \mathbf{a_{3}}& = &\left(-x_{21} \, a + \left(\frac12 - z_{21}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}+ y_{21} \, b \, \mathbf{\hat{y}}+ \left(\frac12 - z_{21}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XXI} \\ \mathbf{B}_{83} & = &- x_{21} \, \mathbf{a}_{1} - y_{21} \, \mathbf{a}_{2} - z_{21} \, \mathbf{a_{3}}& = &- \left(x_{21} \, a + z_{21} \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{21} \, b \, \mathbf{\hat{y}}- z_{21} \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XXI} \\ \mathbf{B}_{84} & = &x_{21} \, \mathbf{a}_{1} - y_{21} \, \mathbf{a}_{2} + \left(\frac12 + z_{21}\right) \, \mathbf{a_{3}}& = &\left(x_{21} \, a + \left(\frac12 + z_{21}\right) \, c \, \cos\beta\right) \, \mathbf{\hat{x}}- y_{21} \, b \, \mathbf{\hat{y}}+ \left(\frac12 + z_{21}\right) \, c \, \sin\beta \, \mathbf{\hat{z}}& \left(4g\right) & \mbox{P XXI} \\ \end{array} \]References
- H. Thurn and H. Krebs, Über Struktur und Eigenschaften der Halbmetalle. XXII. Die Kristallstruktur des Hittorfschen Phosphors, Acta Crystallogr. Sect. B Struct. Sci. 25, 125–135 (1969), doi:10.1107/S0567740869001853.
Found in
- J. Donohue, The Structure of the Elements (Robert E. Krieger Publishing Company, Malabar, Florida, 1982)., pp. 292-295.