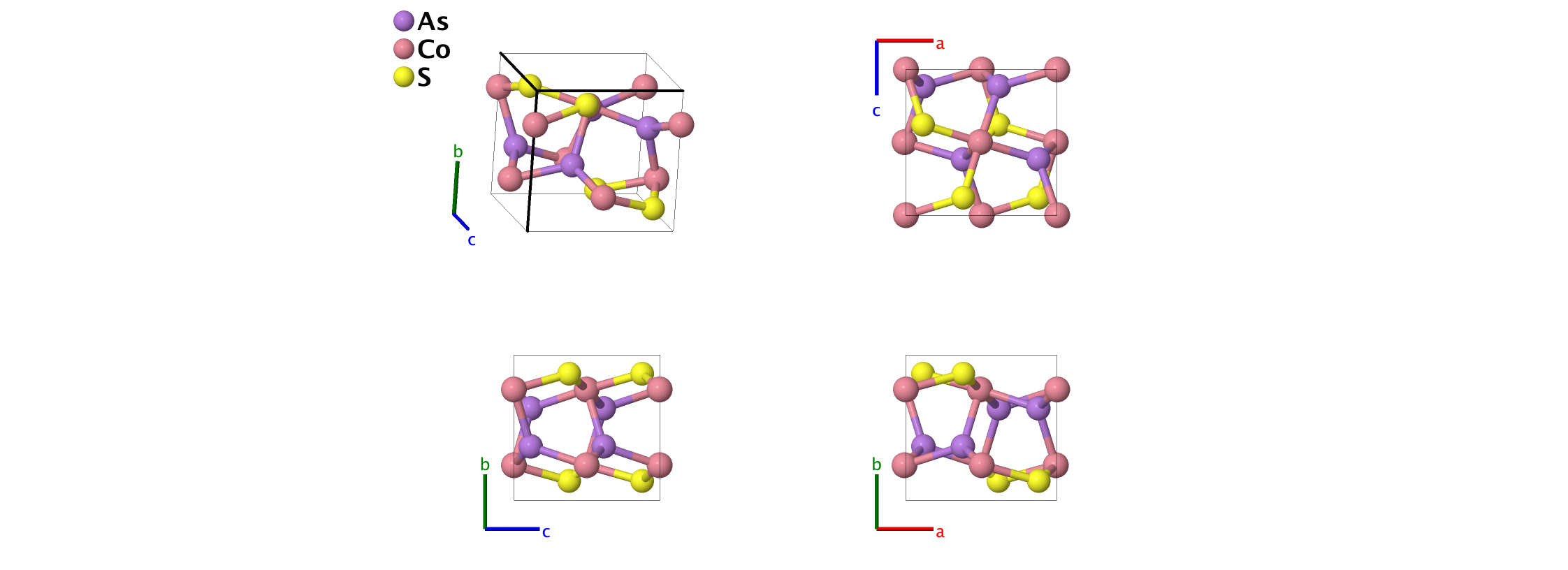
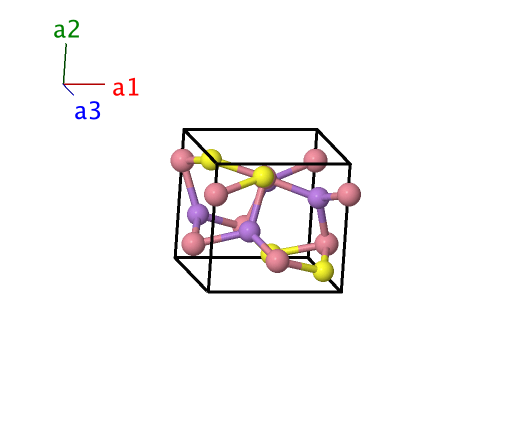
Cobaltite (CoAsS) Structure: ABC_oP12_29_a_a_a
| Prototype | : | CoAsS |
| AFLOW prototype label | : | ABC_oP12_29_a_a_a |
| Strukturbericht designation | : | None |
| Pearson symbol | : | oP12 |
| Space group number | : | 29 |
| Space group symbol | : | $Pca2_{1}$ |
| AFLOW prototype command | : | aflow --proto=ABC_oP12_29_a_a_a --params=$a,b/a,c/a,x_{1},y_{1},z_{1},x_{2},y_{2},z_{2},x_{3},y_{3},z_{3}$ |
Simple Orthorhombic primitive vectors:
\[
\begin{array}{ccc}
\mathbf{a}_1 & = & a \, \mathbf{\hat{x}} \\
\mathbf{a}_2 & = & b \, \mathbf{\hat{y}} \\
\mathbf{a}_3 & = & c \, \mathbf{\hat{z}} \\
\end{array}
\]
Basis vectors:
\[ \begin{array}{ccccccc} & & \mbox{Lattice Coordinates} & & \mbox{Cartesian Coordinates} &\mbox{Wyckoff Position} & \mbox{Atom Type} \\ \mathbf{B}_{1} & = & x_{1} \, \mathbf{a}_{1} + y_{1} \, \mathbf{a}_{2} + z_{1} \, \mathbf{a}_{3} & = & x_{1}a \, \mathbf{\hat{x}} + y_{1}b \, \mathbf{\hat{y}} + z_{1}c \, \mathbf{\hat{z}} & \left(4a\right) & \mbox{As} \\ \mathbf{B}_{2} & = & -x_{1} \, \mathbf{a}_{1}-y_{1} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{1}\right) \, \mathbf{a}_{3} & = & -x_{1}a \, \mathbf{\hat{x}}-y_{1}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{1}\right)c \, \mathbf{\hat{z}} & \left(4a\right) & \mbox{As} \\ \mathbf{B}_{3} & = & \left(\frac{1}{2} +x_{1}\right) \, \mathbf{a}_{1}-y_{1} \, \mathbf{a}_{2} + z_{1} \, \mathbf{a}_{3} & = & \left(\frac{1}{2} +x_{1}\right)a \, \mathbf{\hat{x}}-y_{1}b \, \mathbf{\hat{y}} + z_{1}c \, \mathbf{\hat{z}} & \left(4a\right) & \mbox{As} \\ \mathbf{B}_{4} & = & \left(\frac{1}{2} - x_{1}\right) \, \mathbf{a}_{1} + y_{1} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{1}\right) \, \mathbf{a}_{3} & = & \left(\frac{1}{2} - x_{1}\right)a \, \mathbf{\hat{x}} + y_{1}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{1}\right)c \, \mathbf{\hat{z}} & \left(4a\right) & \mbox{As} \\ \mathbf{B}_{5} & = & x_{2} \, \mathbf{a}_{1} + y_{2} \, \mathbf{a}_{2} + z_{2} \, \mathbf{a}_{3} & = & x_{2}a \, \mathbf{\hat{x}} + y_{2}b \, \mathbf{\hat{y}} + z_{2}c \, \mathbf{\hat{z}} & \left(4a\right) & \mbox{Co} \\ \mathbf{B}_{6} & = & -x_{2} \, \mathbf{a}_{1}-y_{2} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{2}\right) \, \mathbf{a}_{3} & = & -x_{2}a \, \mathbf{\hat{x}}-y_{2}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{2}\right)c \, \mathbf{\hat{z}} & \left(4a\right) & \mbox{Co} \\ \mathbf{B}_{7} & = & \left(\frac{1}{2} +x_{2}\right) \, \mathbf{a}_{1}-y_{2} \, \mathbf{a}_{2} + z_{2} \, \mathbf{a}_{3} & = & \left(\frac{1}{2} +x_{2}\right)a \, \mathbf{\hat{x}}-y_{2}b \, \mathbf{\hat{y}} + z_{2}c \, \mathbf{\hat{z}} & \left(4a\right) & \mbox{Co} \\ \mathbf{B}_{8} & = & \left(\frac{1}{2} - x_{2}\right) \, \mathbf{a}_{1} + y_{2} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{2}\right) \, \mathbf{a}_{3} & = & \left(\frac{1}{2} - x_{2}\right)a \, \mathbf{\hat{x}} + y_{2}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{2}\right)c \, \mathbf{\hat{z}} & \left(4a\right) & \mbox{Co} \\ \mathbf{B}_{9} & = & x_{3} \, \mathbf{a}_{1} + y_{3} \, \mathbf{a}_{2} + z_{3} \, \mathbf{a}_{3} & = & x_{3}a \, \mathbf{\hat{x}} + y_{3}b \, \mathbf{\hat{y}} + z_{3}c \, \mathbf{\hat{z}} & \left(4a\right) & \mbox{S} \\ \mathbf{B}_{10} & = & -x_{3} \, \mathbf{a}_{1}-y_{3} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{3}\right) \, \mathbf{a}_{3} & = & -x_{3}a \, \mathbf{\hat{x}}-y_{3}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{3}\right)c \, \mathbf{\hat{z}} & \left(4a\right) & \mbox{S} \\ \mathbf{B}_{11} & = & \left(\frac{1}{2} +x_{3}\right) \, \mathbf{a}_{1}-y_{3} \, \mathbf{a}_{2} + z_{3} \, \mathbf{a}_{3} & = & \left(\frac{1}{2} +x_{3}\right)a \, \mathbf{\hat{x}}-y_{3}b \, \mathbf{\hat{y}} + z_{3}c \, \mathbf{\hat{z}} & \left(4a\right) & \mbox{S} \\ \mathbf{B}_{12} & = & \left(\frac{1}{2} - x_{3}\right) \, \mathbf{a}_{1} + y_{3} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{3}\right) \, \mathbf{a}_{3} & = & \left(\frac{1}{2} - x_{3}\right)a \, \mathbf{\hat{x}} + y_{3}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{3}\right)c \, \mathbf{\hat{z}} & \left(4a\right) & \mbox{S} \\ \end{array} \]References
- M. E. Fleet and P. C. Burns, Structure and twinning of cobaltite, Can. Mineral. 28, 719–723 (1990).
Found in
- P. Villars and K. Cenzual, Pearson's Crystal Data – Crystal Structure Database for Inorganic Compounds, ASM International (2013).