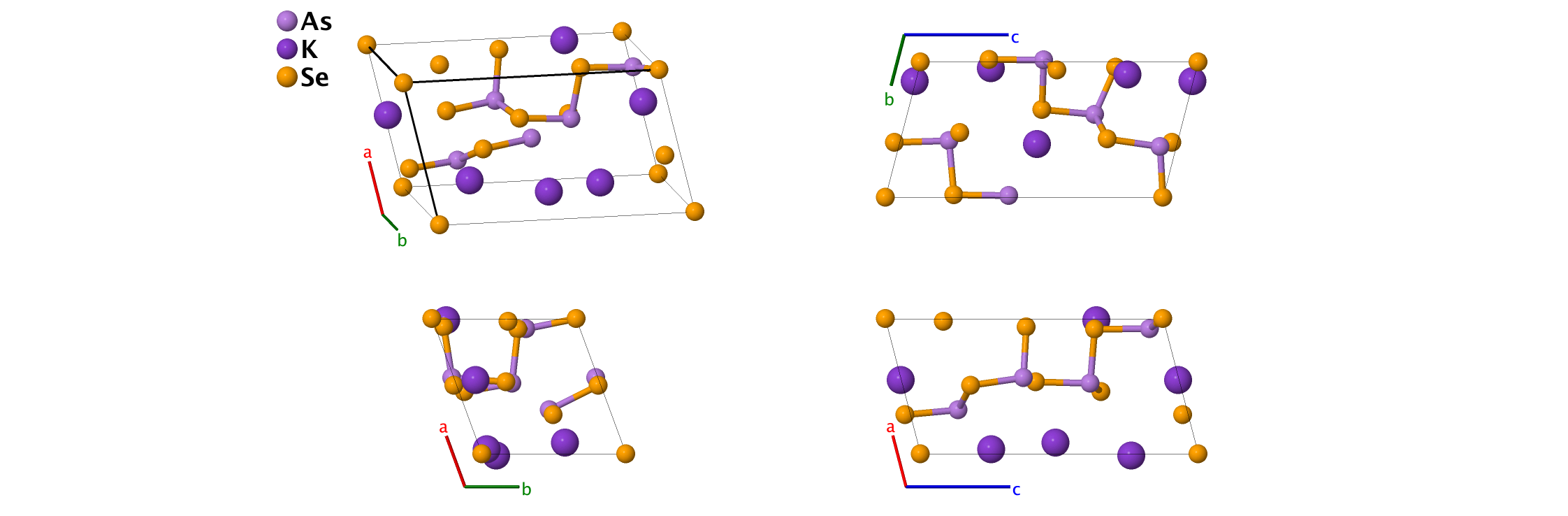
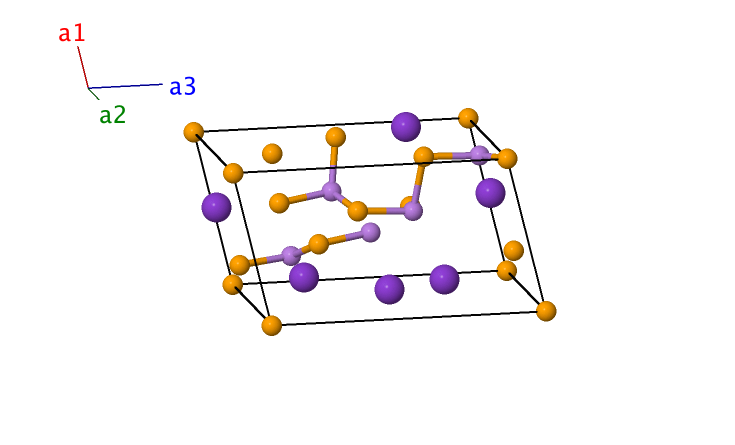
AsKSe2 (P1) Structure: ABC2_aP16_1_4a_4a_8a
| Prototype | : | AsKSe2 |
| AFLOW prototype label | : | ABC2_aP16_1_4a_4a_8a |
| Strukturbericht designation | : | None |
| Pearson symbol | : | aP16 |
| Space group number | : | 1 |
| Space group symbol | : | $\mbox{P1}$ |
| AFLOW prototype command | : | aflow --proto=ABC2_aP16_1_4a_4a_8a --params=$a,b/a,c/a,\alpha,\beta,\gamma,x_{1},y_{1},z_{1},x_{2},y_{2},z_{2},x_{3},y_{3},z_{3},x_{4},y_{4},z_{4},x_{5},y_{5},z_{5},x_{6}, \\y_{6},z_{6},x_{7},y_{7},z_{7},x_{8},y_{8},z_{8},x_{9},y_{9},z_{9},x_{10},y_{10},z_{10},x_{11},y_{11},z_{11},x_{12},y_{12},z_{12},x_{13},y_{13}, \\z_{13},x_{14},y_{14},z_{14},x_{15},y_{15},z_{15},x_{16},y_{16},z_{16}$ |
Triclinic primitive vectors:
\[
\begin{array}{ccc}
\mathbf{a}_1 & = & a \mathbf{\hat{x}} \\
\mathbf{a}_2 & = & b \cos\gamma \, \mathbf{\hat{x}} + b \sin\gamma \,\mathbf{\hat{y}} \\
\mathbf{a}_3 & = & c_x \mathbf{\hat{x}}
+ c_y \, \mathbf{\hat{y}}
+ c_z \, \mathbf{\hat{z}}
\end{array}
\]
Basis vectors:
\[ \begin{array}{ccccccc} & & \mbox{Lattice Coordinates} & & \mbox{Cartesian Coordinates} &\mbox{Wyckoff Position} & \mbox{Atom Type} \\ \mathbf{B}_{1} & =& x_{1} \, \mathbf{a}_{1} + y_{1} \, \mathbf{a}_{2} + z_{1} \, \mathbf{a}_{3}& =& \left(x_{1} \, a + y_{1} \, b \, \cos\gamma \, + z_{1} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{1} \, b \, \sin\gamma + z_{1} \, c_y\right) \, \mathbf{\hat{y}}+ z_{1} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{As I} \\ \mathbf{B}_{2} & =& x_{2} \, \mathbf{a}_{1} + y_{2} \, \mathbf{a}_{2} + z_{2} \, \mathbf{a}_{3}& =& \left(x_{2} \, a + y_{2} \, b \, \cos\gamma \, + z_{2} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{2} \, b \, \sin\gamma + z_{2} \, c_y\right) \, \mathbf{\hat{y}}+ z_{2} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{As II} \\ \mathbf{B}_{3} & =& x_{3} \, \mathbf{a}_{1} + y_{3} \, \mathbf{a}_{2} + z_{3} \, \mathbf{a}_{3}& =& \left(x_{3} \, a + y_{3} \, b \, \cos\gamma \, + z_{3} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{3} \, b \, \sin\gamma + z_{3} \, c_y\right) \, \mathbf{\hat{y}}+ z_{3} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{As III} \\ \mathbf{B}_{4} & =& x_{4} \, \mathbf{a}_{1} + y_{4} \, \mathbf{a}_{2} + z_{4} \, \mathbf{a}_{3}& =& \left(x_{4} \, a + y_{4} \, b \, \cos\gamma \, + z_{4} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{4} \, b \, \sin\gamma + z_{4} \, c_y\right) \, \mathbf{\hat{y}}+ z_{4} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{As IV} \\ \mathbf{B}_{5} & =& x_{5} \, \mathbf{a}_{1} + y_{5} \, \mathbf{a}_{2} + z_{5} \, \mathbf{a}_{3}& =& \left(x_{5} \, a + y_{5} \, b \, \cos\gamma \, + z_{5} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{5} \, b \, \sin\gamma + z_{5} \, c_y\right) \, \mathbf{\hat{y}}+ z_{5} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{K I} \\ \mathbf{B}_{6} & =& x_{6} \, \mathbf{a}_{1} + y_{6} \, \mathbf{a}_{2} + z_{6} \, \mathbf{a}_{3}& =& \left(x_{6} \, a + y_{6} \, b \, \cos\gamma \, + z_{6} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{6} \, b \, \sin\gamma + z_{6} \, c_y\right) \, \mathbf{\hat{y}}+ z_{6} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{K II} \\ \mathbf{B}_{7} & =& x_{7} \, \mathbf{a}_{1} + y_{7} \, \mathbf{a}_{2} + z_{7} \, \mathbf{a}_{3}& =& \left(x_{7} \, a + y_{7} \, b \, \cos\gamma \, + z_{7} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{7} \, b \, \sin\gamma + z_{7} \, c_y\right) \, \mathbf{\hat{y}}+ z_{7} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{K III} \\ \mathbf{B}_{8} & =& x_{8} \, \mathbf{a}_{1} + y_{8} \, \mathbf{a}_{2} + z_{8} \, \mathbf{a}_{3}& =& \left(x_{8} \, a + y_{8} \, b \, \cos\gamma \, + z_{8} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{8} \, b \, \sin\gamma + z_{8} \, c_y\right) \, \mathbf{\hat{y}}+ z_{8} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{K IV} \\ \mathbf{B}_{9} & =& x_{9} \, \mathbf{a}_{1} + y_{9} \, \mathbf{a}_{2} + z_{9} \, \mathbf{a}_{3}& =& \left(x_{9} \, a + y_{9} \, b \, \cos\gamma \, + z_{9} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{9} \, b \, \sin\gamma + z_{9} \, c_y\right) \, \mathbf{\hat{y}}+ z_{9} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{Se I} \\ \mathbf{B}_{10} & =& x_{10} \, \mathbf{a}_{1} + y_{10} \, \mathbf{a}_{2} + z_{10} \, \mathbf{a}_{3}& =& \left(x_{10} \, a + y_{10} \, b \, \cos\gamma \, + z_{10} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{10} \, b \, \sin\gamma + z_{10} \, c_y\right) \, \mathbf{\hat{y}}+ z_{10} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{Se II} \\ \mathbf{B}_{11} & =& x_{11} \, \mathbf{a}_{1} + y_{11} \, \mathbf{a}_{2} + z_{11} \, \mathbf{a}_{3}& =& \left(x_{11} \, a + y_{11} \, b \, \cos\gamma \, + z_{11} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{11} \, b \, \sin\gamma + z_{11} \, c_y\right) \, \mathbf{\hat{y}}+ z_{11} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{Se III} \\ \mathbf{B}_{12} & =& x_{12} \, \mathbf{a}_{1} + y_{12} \, \mathbf{a}_{2} + z_{12} \, \mathbf{a}_{3}& =& \left(x_{12} \, a + y_{12} \, b \, \cos\gamma \, + z_{12} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{12} \, b \, \sin\gamma + z_{12} \, c_y\right) \, \mathbf{\hat{y}}+ z_{12} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{Se IV} \\ \mathbf{B}_{13} & =& x_{13} \, \mathbf{a}_{1} + y_{13} \, \mathbf{a}_{2} + z_{13} \, \mathbf{a}_{3}& =& \left(x_{13} \, a + y_{13} \, b \, \cos\gamma \, + z_{13} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{13} \, b \, \sin\gamma + z_{13} \, c_y\right) \, \mathbf{\hat{y}}+ z_{13} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{Se V} \\ \mathbf{B}_{14} & =& x_{14} \, \mathbf{a}_{1} + y_{14} \, \mathbf{a}_{2} + z_{14} \, \mathbf{a}_{3}& =& \left(x_{14} \, a + y_{14} \, b \, \cos\gamma \, + z_{14} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{14} \, b \, \sin\gamma + z_{14} \, c_y\right) \, \mathbf{\hat{y}}+ z_{14} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{Se VI} \\ \mathbf{B}_{15} & =& x_{15} \, \mathbf{a}_{1} + y_{15} \, \mathbf{a}_{2} + z_{15} \, \mathbf{a}_{3}& =& \left(x_{15} \, a + y_{15} \, b \, \cos\gamma \, + z_{15} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{15} \, b \, \sin\gamma + z_{15} \, c_y\right) \, \mathbf{\hat{y}}+ z_{15} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{Se VII} \\ \mathbf{B}_{16} & =& x_{16} \, \mathbf{a}_{1} + y_{16} \, \mathbf{a}_{2} + z_{16} \, \mathbf{a}_{3}& =& \left(x_{16} \, a + y_{16} \, b \, \cos\gamma \, + z_{16} \, c_x\right)\, \mathbf{\hat{x}}+ \left(y_{16} \, b \, \sin\gamma + z_{16} \, c_y\right) \, \mathbf{\hat{y}}+ z_{16} \, c_z \, \mathbf{\hat{z}}& \left(1a\right) & \mbox{Se VIII} \end{array} \]References
- W. S. Sheldrick and H. J. Häusler, Zur Kenntnis von Alkalimetaselenoarseniten Darstellung und Kristallstrukturen von MAsSe2, M = K, Rb, Cs, Z. Anorg. Allg. Chem. 561, 139–148 (1988), doi:10.1002/zaac.19885610115.
Found in
- P. Villars and L. Calvert, Pearson's Handbook of Crystallographic Data for Intermetallic Phases (ASM International, Materials Park, OH, 1991), 2nd edn., pp. 1165.