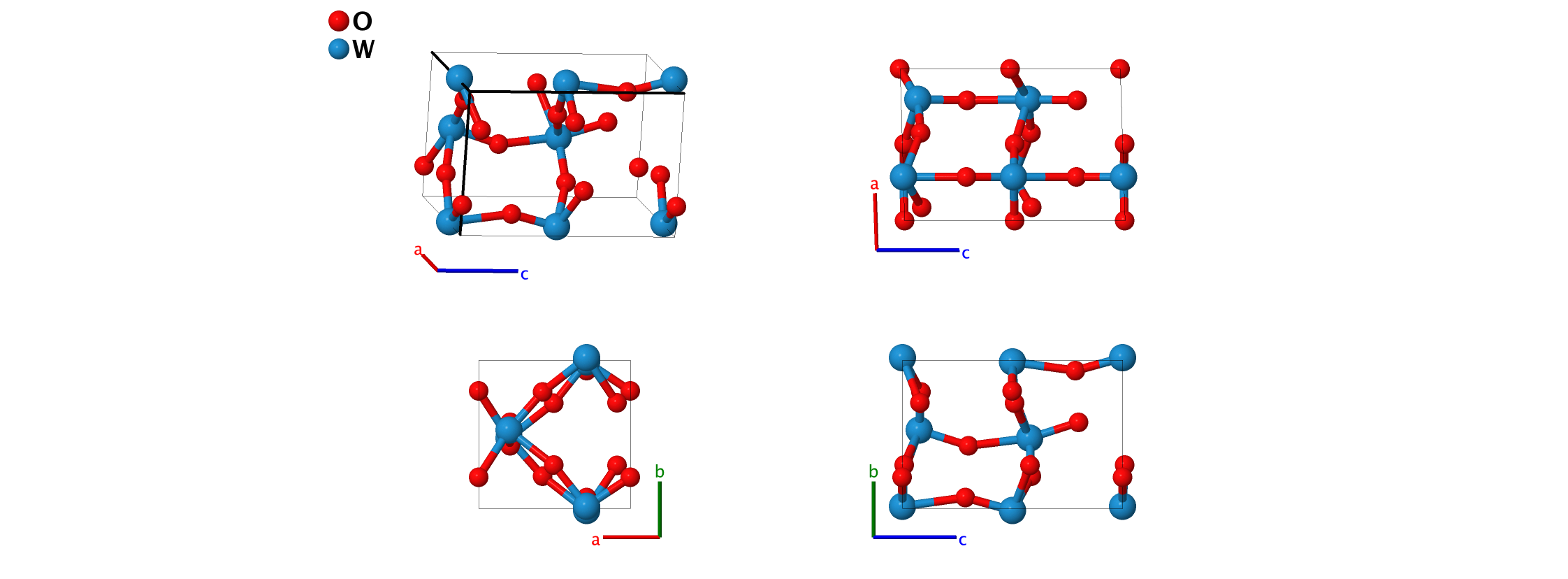
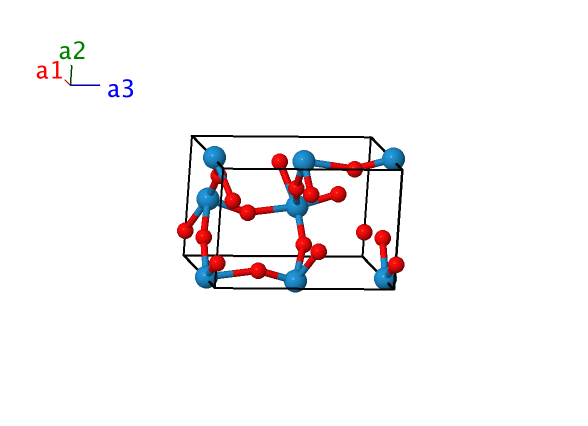
$\epsilon$–WO3 (Low–temperature) Structure: A3B_mP16_7_6a_2a
| Prototype | : | WO3 |
| AFLOW prototype label | : | A3B_mP16_7_6a_2a |
| Strukturbericht designation | : | None |
| Pearson symbol | : | mP16 |
| Space group number | : | 7 |
| Space group symbol | : | $Pc$ |
| AFLOW prototype command | : | aflow --proto=A3B_mP16_7_6a_2a --params=$a,b/a,c/a,\beta,x_{1},y_{1},z_{1},x_{2},y_{2},z_{2},x_{3},y_{3},z_{3},x_{4},y_{4},z_{4},x_{5},y_{5},z_{5},x_{6}, \\y_{6},z_{6},x_{7},y_{7},z_{7},x_{8},y_{8},z_{8}$ |
- All stable phases of WO$_{3}$ are distortions of the cubic $\alpha$-ReO$_{3}$ ($D0_{9}$) phase. (Woodward, 1997 and Vogt, 1999) The known stable phases and their approximate temperature ranges are:
- $\alpha$-WO$_{3}$ (1010-1170K) (Vogt, 1999)
- $\beta$-WO$_{3}$ (600-1170K) (Vogt, 1999)
- $\gamma$-WO$_{3}$ (290-600K) (Vogt, 1999)
- $\delta$-WO$_{3}$ (230-290K) (Diehl, 1978)
- $\epsilon$-WO$_{3}$ (below 23K), this structure (Woodward, 1997)
- The original $D0_{10}$ structure (Bräkken, 1931), (Hermann, 1937) superseded by $\delta$-WO$_{3}$
- Original $\beta$-WO$_{3}$ (Salje, 1977)
- Hexagonal WO$_{3}$ (Gerand, 1979) (metastable)
Simple Monoclinic primitive vectors:
\[
\begin{array}{ccc}
\mathbf{a}_1 & = & a \, \mathbf{\hat{x}} \\
\mathbf{a}_2 & = & b \, \mathbf{\hat{y}} \\
\mathbf{a}_3 & = & c \cos\beta \, \mathbf{\hat{x}} + c \sin\beta \, \mathbf{\hat{z}} \\
\end{array}
\]
Basis vectors:
\[ \begin{array}{ccccccc} & & \mbox{Lattice Coordinates} & & \mbox{Cartesian Coordinates} &\mbox{Wyckoff Position} & \mbox{Atom Type} \\ \mathbf{B}_{1} & = & x_{1} \, \mathbf{a}_{1} + y_{1} \, \mathbf{a}_{2} + z_{1} \, \mathbf{a}_{3} & = & \left(x_{1}a+z_{1}c\cos\beta\right) \, \mathbf{\hat{x}} + y_{1}b \, \mathbf{\hat{y}} + z_{1}c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{O I} \\ \mathbf{B}_{2} & = & x_{1} \, \mathbf{a}_{1}-y_{1} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{1}\right) \, \mathbf{a}_{3} & = & \left(\frac{1}{2}c\cos\beta +x_{1}a + z_{1}c\cos\beta\right) \, \mathbf{\hat{x}}-y_{1}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{1}\right)c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{O I} \\ \mathbf{B}_{3} & = & x_{2} \, \mathbf{a}_{1} + y_{2} \, \mathbf{a}_{2} + z_{2} \, \mathbf{a}_{3} & = & \left(x_{2}a+z_{2}c\cos\beta\right) \, \mathbf{\hat{x}} + y_{2}b \, \mathbf{\hat{y}} + z_{2}c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{O II} \\ \mathbf{B}_{4} & = & x_{2} \, \mathbf{a}_{1}-y_{2} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{2}\right) \, \mathbf{a}_{3} & = & \left(\frac{1}{2}c\cos\beta +x_{2}a + z_{2}c\cos\beta\right) \, \mathbf{\hat{x}}-y_{2}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{2}\right)c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{O II} \\ \mathbf{B}_{5} & = & x_{3} \, \mathbf{a}_{1} + y_{3} \, \mathbf{a}_{2} + z_{3} \, \mathbf{a}_{3} & = & \left(x_{3}a+z_{3}c\cos\beta\right) \, \mathbf{\hat{x}} + y_{3}b \, \mathbf{\hat{y}} + z_{3}c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{O III} \\ \mathbf{B}_{6} & = & x_{3} \, \mathbf{a}_{1}-y_{3} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{3}\right) \, \mathbf{a}_{3} & = & \left(\frac{1}{2}c\cos\beta +x_{3}a + z_{3}c\cos\beta\right) \, \mathbf{\hat{x}}-y_{3}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{3}\right)c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{O III} \\ \mathbf{B}_{7} & = & x_{4} \, \mathbf{a}_{1} + y_{4} \, \mathbf{a}_{2} + z_{4} \, \mathbf{a}_{3} & = & \left(x_{4}a+z_{4}c\cos\beta\right) \, \mathbf{\hat{x}} + y_{4}b \, \mathbf{\hat{y}} + z_{4}c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{O IV} \\ \mathbf{B}_{8} & = & x_{4} \, \mathbf{a}_{1}-y_{4} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{4}\right) \, \mathbf{a}_{3} & = & \left(\frac{1}{2}c\cos\beta +x_{4}a + z_{4}c\cos\beta\right) \, \mathbf{\hat{x}}-y_{4}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{4}\right)c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{O IV} \\ \mathbf{B}_{9} & = & x_{5} \, \mathbf{a}_{1} + y_{5} \, \mathbf{a}_{2} + z_{5} \, \mathbf{a}_{3} & = & \left(x_{5}a+z_{5}c\cos\beta\right) \, \mathbf{\hat{x}} + y_{5}b \, \mathbf{\hat{y}} + z_{5}c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{O V} \\ \mathbf{B}_{10} & = & x_{5} \, \mathbf{a}_{1}-y_{5} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{5}\right) \, \mathbf{a}_{3} & = & \left(\frac{1}{2}c\cos\beta +x_{5}a + z_{5}c\cos\beta\right) \, \mathbf{\hat{x}}-y_{5}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{5}\right)c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{O V} \\ \mathbf{B}_{11} & = & x_{6} \, \mathbf{a}_{1} + y_{6} \, \mathbf{a}_{2} + z_{6} \, \mathbf{a}_{3} & = & \left(x_{6}a+z_{6}c\cos\beta\right) \, \mathbf{\hat{x}} + y_{6}b \, \mathbf{\hat{y}} + z_{6}c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{O VI} \\ \mathbf{B}_{12} & = & x_{6} \, \mathbf{a}_{1}-y_{6} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{6}\right) \, \mathbf{a}_{3} & = & \left(\frac{1}{2}c\cos\beta +x_{6}a + z_{6}c\cos\beta\right) \, \mathbf{\hat{x}}-y_{6}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{6}\right)c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{O VI} \\ \mathbf{B}_{13} & = & x_{7} \, \mathbf{a}_{1} + y_{7} \, \mathbf{a}_{2} + z_{7} \, \mathbf{a}_{3} & = & \left(x_{7}a+z_{7}c\cos\beta\right) \, \mathbf{\hat{x}} + y_{7}b \, \mathbf{\hat{y}} + z_{7}c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{W I} \\ \mathbf{B}_{14} & = & x_{7} \, \mathbf{a}_{1}-y_{7} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{7}\right) \, \mathbf{a}_{3} & = & \left(\frac{1}{2}c\cos\beta +x_{7}a + z_{7}c\cos\beta\right) \, \mathbf{\hat{x}}-y_{7}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{7}\right)c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{W I} \\ \mathbf{B}_{15} & = & x_{8} \, \mathbf{a}_{1} + y_{8} \, \mathbf{a}_{2} + z_{8} \, \mathbf{a}_{3} & = & \left(x_{8}a+z_{8}c\cos\beta\right) \, \mathbf{\hat{x}} + y_{8}b \, \mathbf{\hat{y}} + z_{8}c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{W II} \\ \mathbf{B}_{16} & = & x_{8} \, \mathbf{a}_{1}-y_{8} \, \mathbf{a}_{2} + \left(\frac{1}{2} +z_{8}\right) \, \mathbf{a}_{3} & = & \left(\frac{1}{2}c\cos\beta +x_{8}a + z_{8}c\cos\beta\right) \, \mathbf{\hat{x}}-y_{8}b \, \mathbf{\hat{y}} + \left(\frac{1}{2} +z_{8}\right)c\sin\beta \, \mathbf{\hat{z}} & \left(2a\right) & \mbox{W II} \\ \end{array} \]References
- P. M. Woodward, A. W. Sleight, and T. Vogt, Ferroelectric tungsten trioxide, J. Solid State Chem. 131, 9–17 (1997), doi:10.1006/jssc.1997.7268.
- T. Vogt, P. M. Woodward, and B. A. Hunter, The High-Temperature Phases of WO3, J. Solid State Chem. 144, 209–215 (1999), doi:10.1006/jssc.1999.8173.
- R. Diehl, G. Brandt, and E. Salje, The Crystal Structure of Triclinic WO3, Acta Crystallogr. Sect. B Struct. Sci. 34, 1105–1111 (1978), doi:10.1107/S0567740878005014.
- H. Bräkken, Die Kristallstrukturen der Trioxyde von Chrom, Molybdän und Wolfram, Zeitschrift für Kristallographie — Crystalline Materials 78, 484–488 (1931), doi:10.1524/zkri.1931.78.1.484.
- C. Hermann, O. Lohrmann, and H. Philipp, eds., Strukturbericht Band II 1928-1932 (Akademische Verlagsgesellschaft M. B. H., Leipzig, 1937).
- E. Salje, The Orthorhombic Phase of WO3, Acta Crystallogr. Sect. B Struct. Sci. 33, 574–577 (1977), doi:10.1107/S0567740877004130.
Found in
- P. Villars and K. Cenzual, Pearson's Crystal Data – Crystal Structure Database for Inorganic Compounds, ASM International (2013).